Message Detail
财联VIP专栏【电报解读】宇树科技科创板IPO将于6月1日上会!机构称产能爬坡、场景验证与技术收敛同步推进下,202......
AI Report
AI 简报
宇树科技科创板IPO上会及人形机器人产业简报
核心结论
宇树科技作为全球人形机器人出货量第一的企业,将于6月1日科创板IPO上会,拟募资42.02亿元。此事件标志其自身发展进入新阶段,也与行业大趋势共振:市场普遍认为2026年人形机器人产业已正式进入核心规模化验证期,产能、订单与技术正同步突破。
关键信息
- 宇树科技IPO上会:上交所公告显示,上市审核委员会定于2026年6月1日审议宇树科技股份有限公司首发申请。该公司今年3月获受理,拟募资42.02亿元。
- 全球市场主导地位:2025年,宇树科技人形机器人出货量超5500台,全球市场占比达32.4%,出货量和市场份额均居全球第一。其核心部件国产化率超90%。
- 产业进入规模化验证期:机构分析指出,2026年人形机器人产业正从“量产元年”迈向“核心规模化验证期”。供给端出现三大突破:万台级产能下线、订单批量进入工业场景、多元场景加速验证。
- 市场增长预测:集邦咨询预估2026年全球人形机器人出货量突破5万台;摩根士丹利则预测中国市场销量将达2.8万台,2030年增至26.2万台。
潜在影响
- 对产业链的拉动:头部企业IPO募资扩产,将直接加大对上游核心零部件(如减速器、电机、传感器、丝杠等)的采购需求,带动整个供应链发展。
- 行业催化效应:作为行业标杆,宇树科技的成功上市有望提升资本市场对整个人形机器人赛道的关注度和估值预期,可能引发新一轮投资热潮。
- 技术路径收敛:行业进入规模化验证期,意味着经过市场选择的优势技术方案(如电机直驱、开源强化学习等)将加速确立主流地位,相关技术供应商受益。
- 商业化落地提速:量产与场景验证的同步推进,将加速人形机器人在工业制造(汽车、3C)、物流、商用服务等领域的应用普及,形成更清晰的商业模式。
关注要点
- 审核结果与发行定价:6月1日上会审议结果及后续的发行估值情况,将直接影响市场情绪。
- 募资投向与产能规划:关注42.02亿元募资的具体用途,尤其是在产能扩张和技术研发上的分配,这是其未来市占率能否维持的关键。
- 订单与业绩兑现:投资者应持续跟踪宇树科技及优必选、智元等主要厂商的订单落地和实际出货量增长情况,验证规模化逻辑。
- 竞争格局变化:关注华为、比亚迪、特斯拉等巨头在人形机器人领域的实际进展,评估对现有“六强”格局的冲击。
关联个股
- 凌云光:公司联合宇树科技提出基于自主动捕系统FZMotion的具身智能解决方案,用于机器人研发训练,可精准捕捉人体动作。
- 斯菱智驱:公司正积极推进机器人关节核心部件——谐波减速器及执行器模组的量产,主要聚焦谐波减速器的研发与量产,核心设备已到位,准备小批量量产。
(注:原文仅明确提及上述两家公司的具体业务关联,其他零部件、软件及系统集成商虽在产业链图谱中提及,但无直接合作关系描述。)
Content
正文
【电报解读】宇树科技科创板IPO将于6月1日上会!机构称产能爬坡、场景验证与技术收敛同步推进下,2026年人形机器人产业已进入核心规模化验证期,这家公司联合宇树提出具身智能解决方案
电报解读
2026.05.25 20:58 星期一

回回回回
| ∥电报内容 | 微信扫码 | 大V实盘 视频直播 海量资讯作文免费看 |
|---|---|---|
| ∥电报内容 | cset.cnthesims.com | 一手资讯 同步更新 全网最全 最真 最快 最及时 |
| 【宇树科技科创板IPO将于6月1日上会 拟募资42.02亿元】财联社5月25日电,上海证券交易所上市审核委员会定于2026年6月1日召开2026年第31次上市审核委员会审议会议,审议宇树科技股份有限公司(首发)。上交所于今年3月份受理宇树科技股份有限公司科创板IPO申请,拟融资金额42.02亿元。 | 【宇树科技科创板IPO将于6月1日上会 拟募资42.02亿元】财联社5月25日电,上海证券交易所上市审核委员会定于2026年6月1日召开2026年第31次上市审核委员会审议会议,审议宇树科技股份有限公司(首发)。上交所于今年3月份受理宇树科技股份有限公司科创板IPO申请,拟融资金额42.02亿元。 | 【宇树科技科创板IPO将于6月1日上会 拟募资42.02亿元】财联社5月25日电,上海证券交易所上市审核委员会定于2026年6月1日召开2026年第31次上市审核委员会审议会议,审议宇树科技股份有限公司(首发)。上交所于今年3月份受理宇树科技股份有限公司科创板IPO申请,拟融资金额42.02亿元。 |
Ⅱ 电报解读
一、宇树科技人形机器人2025年出货量和市场占比均居全球第一
宇树科技从初创团队发展成为全球机器人领军企业,产品覆盖消费、工业、科研等多场景,持续引领机器人技术创新与产业落地。公司从成立以来专注于高性能足式和人形机器人研发,以电机直驱技术为核心。技术方面,宇树科技实现了核心部件90%以上国产化,成本大幅降低,并开源强化学习代码库推动行业生态发展。
《2025年人形机器人市场研究报告》显示,中国凭借完善的供应链体系、核心技术自主化突破及多场景落地优势,稳居全球人形机器人产业第一大国。2025年,中国人形机器人整机企业数量超过140家,出货量约1.44万台,占全球总出货量的84.7%,市场规模达到15.5亿元,全球占比约53.8%。
从企业出货量份额来看,中国企业表现突出,宇树科技、智元、乐聚、加速进化、松延动力、优必选出货量位居全球前六位,合计占据全球74.1%的出货量份额,其中宇树科技的人形机器人出货量超5500台,全球占比达32.4%,出货量和市场占比均居全球第一。
二、供给端实现产能、订单、场景三重突破下,2026年人形机器人产业进入核心规模化验证期
上海证券吴婷婷指出,近期国内外产业端迎来密集催化,产业潮起入局者明显增多,国内华为、字节、比亚迪、小米、广汽、蚂蚁等车企、科技厂商纷纷加码具身智能,海外特斯拉、1X、Figure AI等加速商业化量产步伐,DeepSeek人工智能公司的涌现推动通用机器人大模型的发展,助力人形机器人实现具身智能,人形机器人产业链进入“百花齐放,百家争鸣”阶段,目前人形机器人进入工业场景,已经成为国内外确定性较高的应用趋势,人形机器人商业化落地可期,建议关注受益的国内零部件厂商,后续建议关注人形机器人产业链相关事件催化:国内外人形机器人本体厂商的成果发布等。
此外,大公国际人形机器人行业团队认为,人形机器人产业正从实验室原型验证、小批量试产迈向规模化量产与商业化落地,2025年为行业“量产元年”,2026年进入核心规模化验证期,产能爬坡、场景验证与技术收敛同步推进。供给端实现产能、订单、场景三重突破:产能方面,2026年3月智元机器人达成万台具身机器人下线,标准化供应链与自动化产线逐步成熟;订单方面,优必选、智元机器人等企业的产品批量进入汽车、3C、物流等工业场景,商用服务、特种作业及家庭康养场景加速验证。行业增长动能强劲,2025年全球人形机器人整机出货初步放量,集邦咨询预估2026年全球出货量突破5万台,摩根士丹利上调2026年中国市场销量至2.8万台,并预测2030年、2035年将分别达26.2万台、260万台,长期增长空间广阔。
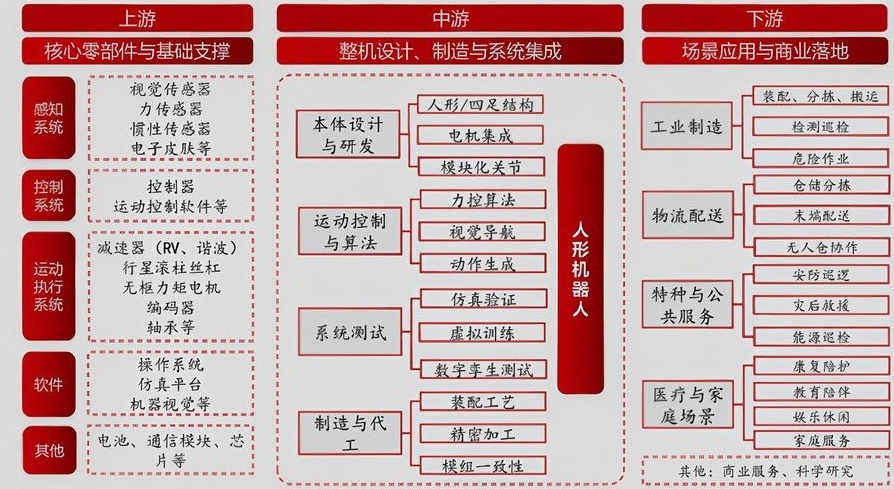
图表 1 人形机器人产业链图谱
上游
核心零部件与基础支撑
感知系统
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
软件
操作系统
仿真平台
机器视觉等
电池、通信模块、芯片等
其他
上游
核心零部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心零部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波)
行星滚柱丝杠
无框力矩电机
编码器
轴承等
其他
上游
核心部件与基础支撑
视觉传感器
力传感器
惯性传感器
电子皮肤等
控制系统
控制器
运动控制软件等
减速器(RV、谐波
资料来源:公开资料
三、相关上市公司:凌云光、斯菱智驱
凌云光:公司联合宇树科技提出针对机器人研发训练的具身智能解决方案,该方案以公司自主研发的动捕系统FZMotion为基础,面向包含人形机器人的多场景应用,能够以亚毫米级别精度精准捕捉人体的姿态动作和运动轨迹。
斯菱智驱:公司机器人零部件产品计划覆盖工业机器人、协作机器人及人形机器人等领域。公司正积极推进谐波减速器及执行器模组量产工作。公司主要聚焦于谐波减速器的研发和量产,谐波减速器的核心设备已于2024年底陆续到位,安装调试结束后可开始小批量量产。

电
电报解读
¥ 898 起
火线解读!即时推送重要资讯独家深度解析
剩余23天到期 立即续费
Image
拼接预览